テスラは2016年10月を境に全モデルのハードウェアを更新して、同時にオートパイロット機能のための運転支援ソフトウェアを完全に入れ替えました。その時点で納車していない車体を含め、すべて新しいハードウェアに切り替えられています。
日本国内では、モデルXの納車が始まったのは2017年1月からですから、すべて新しいハードウェアです。これは広くいろいろな記事などで、ハードウェアはHW1とHW2、オートパイロット機能を含めたソフトウェアはAP1とAP2と呼ばれています。
詳しい違いはWikipediaなどに書かれていますが、主な違いはHW1ではカメラが1台だったのに対して、HW2ではカメラが360度をカバーする8台になり、これらを同時に画像処理するためにNVIDIA Drive PX2という高性能機械学習プラットフォームのためのコンピューティングパワーが与えられています。
これは主としてオートパイロットという運転支援機能のための装備で、HW2になってから1年、少しずつ機能向上や精度向上が図られているにもかかわらず、いまだに機能・性能的にはAP2はAP1に追いついてすらいないという課題を抱えています。
今日はオートパイロットではなく、もう少し地味で、HW1とHW2でほぼ共通した仕様である超音波センサーについて、です。厳密には性能差があるそうですが、センサー自体はどちらも自動車の全周にわたって12個配置されており、360度、車体の近くにある物体を検知することができます。
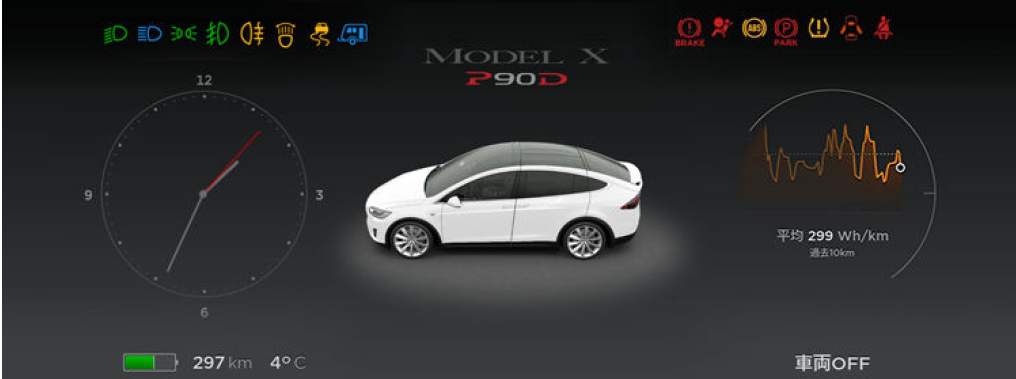
テスラの計器パネルは変形カラー液晶ディスプレイで、標準的には以下のような画面を表示します。実際に表示されている内容はシーンごとに異なり、また、自車の画像はちゃんと実際のモデルや色にあわせて表示されるのですが、これはマニュアルからとったものです。
そして、下の写真はバックしているときの計器パネルを撮影したものです。こんな感じで周囲にある障害物の形状と距離をリアルタイムに表示してくれるので、明確な目安になります。前進しているときでも、速度が遅く障害物に近づいているときは前方向に同様の表示が出ます。

ギリギリまで寄せたいとか、距離が数字でわかるというのは気が利いていますね。
ただ、実際の障害物は3次元なのに対して、2次元で表示しているので、あまり信じすぎて大丈夫なのかは、よくわかりません。もしかしたら、まだ距離があると思っていたら、段差で下の部分だけをこすってしまうかもしれないので、過信は禁物かな~とは思います。